CHR-6dm Attitude and Heading Reference System

This IMU from CH Robotics is an Attitude and Heading Reference System (AHRS) that combines three gyro axes, three accelerometer axes, three magnetic compass axes, and a powerful 32-bit ARM Cortex on one tiny, 2.7g board. An on-board Extended Kalman Filter (EKF) handles the tricky data fusion problem, reporting yaw, pitch, and roll angles at up to 300 Hz over a simple TTL serial interface. The CHR-6dm provides built-in routines for gyro bias calibration, and PC software is available for automatic soft and hard iron magnetometer calibration. The Cortex’s programming pins are exposed, and the firmware is open-source.
| Specs (9) | Pictures (4) | Resources (12) | FAQs (0) | On the blog (0) | 葫芦娃app (0) |
|---|
 |
CHR-6dm AHRS IMU with US quarter for size reference. |
|---|
 |
CHR-6dm attitude and heading reference system (AHRS). |
|---|
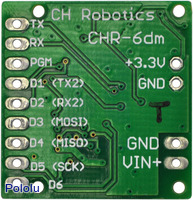 |
Bottom view of the CHR-6dm attitude and heading reference system (AHRS). |
|---|
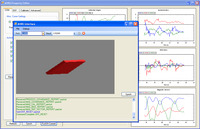 |
AHRS Interface PC software for the CHR-6dm AHRS IMU. |
|---|
Related products









Related categories



Home | Forum | Blog | Support | Ordering Information | Lists | 葫芦娃app | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
